十進位制、多進位制、逆向神經網路計算機專利技術深度解密檔案
1
:位權資訊
所謂“位權資訊”,是由位置資訊加權的神經網路單元資訊,是由一維空間網路節點組成的單元資訊,並且和進位制相關,每個節點“權值”各有不同,多個節點組成一個神經單元,神經單元執行時,只有一個節點資訊是“凸出”或“凹陷”,其它各節點靜默,“凸出”或“凹陷”和“靜默”的資訊特徵由神經網路單元內部各節點資訊相互比較而顯現,例如:在一個神經網路單元中,多數節點資訊處於高電平,只有一個節點資訊處於低電平,這種表達叫做“凹陷”表達,多數節點資訊處於低電平,只有一個節點資訊處於高電平,這種表達就叫做“凸出”表達。“靜默”所指是處於靜止未啟用的輸出狀態,“靜默”狀態輸出值是依照“凸出”或“凹陷”的狀態資訊而定,無論“凸出”或“凹陷”是高電平或低電平,它處於神經網路節點資訊狀態是“有效”、“啟用”狀態,與其連線的下一級節點資訊,必須改變狀態,這種產生作用的狀態稱為“有”效狀態;這樣“靜默”狀態的輸出總是對與其連線的下一級節點不產生任何作用;這種“無”作用的狀態稱之為“無”狀態。這就是“有1”和“ 無
”的形成過程。“有1”和“ 無
”是神經網路單元各節點資訊的形象評判。如下圖:

從數字表達計算方面看,“位權資訊”是空間分佈的多個網路節點組成,有兩種“位權”表達方法,一是“進位位權”,二是“本位位權”,兩種“位權”表達方法都是利用空間“位置”表明數值大小的方法;習慣上人們把水平無序排列的各位數字,按其所處位置的不同所設立的位置權重稱為“位權”。在“量化邏輯”中把這種“位權”稱為“進位位權”,因為各位之間存在進位關係。所謂“本位位權”依然是空間排列的多個節點組成的一組數字,不過參照“進位位權”:如果“進位位權”是水平無序排列的各位數字,那麼“本位位權”就是垂直有序排列的節點位置數字,是按大小次序排列的,一個數字只佔一個列節點位置,一列節點數字中每個數不能重複,保持其唯一性,一列數字共有多少個數位元組點由小到大排列,就是幾進位制;用“進位位權”表達的一組數字,其各個位置的數是用一列“本位位權”數字中的一個數字作為“顯值”,其它“本位位權”的各數都處於“隱藏”狀態,不顯示其值。“本位位權”的各位置數字,從小到大可以迴圈、往復、跳躍使用。
“本位位權”和“進位位權”都是用二維空間節點位置表述數量多少的一種空間表達方法,“進位位權”用個、十、百、千、萬、十萬……來表述各位的進位位權,“本位位權”用0、1、2、3、4…。。來表述空間的分佈位置權,由“本位位權”中的數字位置多少,確定“進位位權”的進位制式。因此,“進位位權”是由“本位位權”限定的進位制式。
這種“位權資訊”的表達方法方法在老式的機械儀表中得到廣泛使用。如下圖:

整齊的陣列式排布,無次序的“權值”“凸出”,表達不了具體數值。

打亂的整體佈局,整齊的“凸出”顯示,明確指向數:83194275。把平面含有數字符號的空間單元從另一維度兩頭捲曲對接可得到連續迴圈的“凸出顯示”視窗。大家可以看到,二維空間分佈的數字在第三維方向捲曲形成的數字環是完全的硬體設施,它永遠是存在的,而水平遮擋留出的視窗顯示數字則是唯一的,迴圈變化的。這裡“顯示”與“不顯示”是“狀態”,顯示的數字是“權”,在“顯示”的狀態下,有多個可以選擇的顯示“權值”,只有展現在視窗內的“權值”才能被“顯示”,其它各“權值”依然存在,但被視窗外的設施隱藏、遮擋。“權值”只能顯示一個“權值”,只有“態權”結合,才能完整表達這裡的意義。這裡的“顯示”和“不顯示”和“有效”“無效”,“作用”和“無作用”,“啟用”和“未啟用”等資訊類似,具有相同的意義。

抽出來的一位本位位權節點排列,明顯的符合逆向神經網路神經單元屬性。具備1×10矩陣單元屬性。所有的神經網路表達都是這種“態權”資訊結構。
這樣看來,“位權資訊”就是神經網路單元資訊,同時可見,神經網路單元資訊很早以前就已得到廣泛的運用,就是無人關注罷了。
2
:位權量化器
位權量化器就是把模擬資訊對映成空間網路節點資訊的器件。由此獲得逆向神經網路計算機具備處理模擬資訊的能力。

人工神經元

逆向神經單元“態權”資訊架構
由於神經網路單元與現有的人工神經元資訊流動方向不同,處理方法亦不同(人工神經元是把不同節點的權重輸入歸一化處理,形成一個需要的輸出;在這裡我們所說的神經元是把一個模擬的輸入資訊離散成不同權重的空間節點輸出),由於這兩種神經元資訊處理方向不同,按神經網路概念建立的先後次序,之前的稱為“神經網路”,所以我們的神經網路單元就稱為“逆向神經網路單元”。
位權量化器是把模擬資訊轉變為逆向神經網路單元資訊的器件,轉換方法為:用已經設定好的資訊“幅度模型”去測量模擬資訊,模擬資訊的輸入幅度落入那個幅度區間,該區間的輸出便輸出一個二值脈衝,通常一個“幅度模型”需要幾個“幅度模型”區間,並且和進位制關聯,二進位制需兩個“幅度模型”區間,三進位制需三個“幅度模型”區間……。十進位制用十個“幅度模型”區間等,一個“幅度模型”區間對應一個二值輸出節點,這樣三個“幅度模型”區間有三個二值輸出節點,四個“幅度模型”區間有四個二值輸出節點……。十個“幅度模型”區間有十個二值輸出節點。這樣,多個二值狀態輸出的節點在空間的分佈,就演變為含進位制的多值態權資訊組合,用二值狀態判斷這個節點有無輸出,用有輸出節點的分佈位置表示進位制內的某一個值。這就構成一個節點的狀態輸出有兩層含義,一個是顯現的、實際執行的二值狀態資訊,一個是隱含的端子位置編號資訊,二值狀態有兩個值,稱為“態值”,隱含的節點位置編號稱之為“權值”,權值只有一個值、是單值資訊,這就組成了“量化邏輯”所述的“態權”資訊架構。之前的轉換過程全程與時鐘無關,而轉換完的二值輸出節點組合。便受時鐘支配,衡量二值多節點輸出的多值資訊,是以空間多輸出節點組為單元,一個時鐘週期下,這一組空間輸出節點上的輸出表示一個多值資訊,空間節點組上的各狀態輸出不能拆分。組中所有節點的二態輸出為一個神經網路資訊單元,組中一個凸出的或凹陷的脈衝輸出節點位置資訊就是這一組神經網路資訊單元的權值輸出。凸出或凹陷的脈衝輸出就是“狀態”,有“狀態”輸出的節點位置編號就是“權值”。實現這種功能的電路是專利
除了位權量化器之外,還有獲得逆向神經網路節點資訊單元的其它方法。
1
:譯碼器

這個電路大家都熟悉,譯碼器的輸出實際是標準的神經網路單元,你總不能說譯碼器的輸出是二進位制資訊吧,那是你只看到單節點的門輸出關係; 如果你看到的是十進位制輸出,那你只是全域性整體的對全部輸出節點的綜合評判;凡是片面的看待譯碼器的輸出得不到完整的結論,只有完整的看待和理解譯碼器的輸出,才能正確判斷譯碼器輸出的“態”“權”屬性,譯碼器的這種單節點看是二值邏輯,整體看是多進位制及十進位制的特性,是典型的“態權”資訊架構,二值輸出為“態”,十進位制輸出為“權”,“態值”為載體資訊,“權值”為對映資訊,只有把“權值”對映到“態值”之上,才能完整的表達這種“態權”資訊輸出,這種既非純“態”又非純“權”的資訊架構,即是逆向神經元所具備的屬性。於是我們稱其為逆向神經網路單元電路輸出。詳細的分析理解我就不多說了。
把譯碼器的輸出及單刀多擲開關的輸出定義為神經網路單元資訊,可能會有爭議,但這是無關緊要的,重要的的是利用神經網路實現十進位制及其以上的各種進位的制數值運算,彌補二值計算機的不足才是王道,稱謂有爭議可以變更。
2
:單刀多擲開關

在單刀多擲開關的刀上接入固定電壓之電源,多個擲上的電壓輸出組合就是逆向神經網路單元。這裡不在詳述。
3
:逆向神經網路的數字運算方法
所謂陣列運算、多值電晶體運算,其實都是逆向神經網路單元的分層運算和分形連線,是一種固定空間逆向神經網路硬體佈局,所有的運算方法均被逆向神經網路連線所代替,所有的運算資訊均被逆向神經網路連線結構儲存,所有的運算結果均被逆向神經網路連線儲存,真實的運算過程,就是用輸入的逆向神經網路資訊,對事先構建的空間網路佈局、連線、通路的啟用並輸出,只需消耗一個時鐘週期即可完成運算。
所有的運算早已在硬體製造時按運算型別、運算結果“對應”連線好的空間逆向神經網路網路硬體佈局,運算過程只是用逆向神經網路單元資訊“啟用”相“對應”的“網路連線通道”而得到答案的輸出過程。

上圖所示是逆向神經網路計算機進位分形乘法器的網路連線圖,這裡“分形”連線所指的是對邏輯運算的各輸出節點的“標記”用“分形”手段把進位和本位分離,分別連線到各自的不同屬性的節點,產生不同屬性的節點輸出。分形手段同樣適用於演算法分形,例如:一個“標記”節點可分形為加法運算、減法運算、乘法運算、取大取小邏輯運算等等各種型別的運算。這也就是專利申請“賦意分形演算法電路”的核心所在。所謂的陣列式運算,多值電晶體型運算等,都是事先對逆向神經網路架構的佈局設計名稱。
矩陣交運算是可以用“邏輯與門”組成硬體邏輯矩陣,用一個逆向神經網路單元作為行矩陣,用另一個逆向神經網路單元為列矩陣,矩陣乘積為N×N方陣,方陣個輸出組成標記輸出陣列,這種矩陣輸出的標記資訊,既可作為加法運算、減法運算、乘法運算、取大取小邏輯運算等等各種型別的運算分形輸入資訊,又可以是指令控制、地址分配、過程控制等等系列操作的控制資訊,這裡就不遠說了。
4.
逆向神經網路運算網路搭建和連線方法
十進位制逆向神經網路計算機的核心,是用現有硬體搭建網路運算系統,構建網路的過程是互相網聯、決策、判斷、選擇確定的過程。第一,網路運算型別選擇,第二,依賴與第一的決策,選擇邏輯運算硬體,也考慮第三第四決策,正確選擇硬體屬性。第三,依賴於第二的決策,也考慮第四決策,選擇資訊走向及連線去向,第四,依賴於第一、第二、第三的決策,選擇運算方法及運算結果連線節點。所有這些搭建運算網路的方法,可以概括為:“量化賦值”(神經網路單元形成),“邏輯運算”(產生量化標記),“賦意分形”(按之前的選擇確定資訊走向),“承意連線”(按之前的運算方法、要求、把得到的運算結果連線到對應節點)。這也就是“逆向神經網路”的組網的基本方法。
以八進位制加法運算為例說明這種組網方法。第一“量化賦值”,進位制有二進位制、三進位制、四進位制……至無限進位制,選擇為八進位制,選擇八進位制量化器,得到八進位制逆向神經網路資訊。有八個空間資訊節點,用兩路八進位制逆向神經網路資訊進行加法運算。第二“邏輯運算”,兩路資訊運算只需要能對兩路輸入進行邏輯運算的邏輯單元,選二輸入“與”門,按照“量化邏輯”全值“與”邏輯的邏輯運算方法,八進位制運算需要六十四個二輸入與門,組成空間8*8矩陣,產生六十四個“量化標記”,(矩陣交運算)。第三“賦意分形運算”,任何進位制的加法運算都會產生進位,於是就有“本位”和進位之分。(任何一個都數字可以進行加、減、乘、除、取大……等運算,因此又有“演算法分形”)。用三態門或二極體都可做分形元件,分形管的選擇原則是:資訊傳遞功能,隔離功能,隔離的原因是下一級的連線會在一個節點上有許多個連線構成“線或”,而線或是典型的單值邏輯運算(不允許有不同電平輸入)。第四“承意連線”,按之前三步選定進位制式、運算型別、答案類別、和運算關係把分形後的運算輸出,分別連線到逆向神經網路單元兩類不同的輸出節點上。(進位節點2個,本位節點8個)。如此重複128次,便可建立起八進位制逆向神經網路加法器的網路骨架。加上輸入的兩路16條線的搭配組合連線(128次),共有256次的連線操作才能組成運算網路。
我們把本位以及支援矩陣運算單位的硬體組成由一個具有“與”邏輯屬性的電路和兩個能對輸出隔離的三態邏輯電路或二極體邏輯電路構成硬體支援,如下圖:

分形的作用前面已經說了,再說隔離電路,因正態網路矩陣不需要二值邏輯的低電平輸出,具有二值輸出的與邏輯閘的低電平輸出是多餘的,因此需要隔離。下圖是用二值邏輯電路組成的“八進位制加法運算網路連線方法”。

你可以參照上述圖形,也可以設想運算,例如八進位制運算4+5=11可以在圖中找到Y45與邏輯閘,還可以檢視該門輸入是A是第4線,B是第5線(賦意),輸出用二極體分兩路(分形),由於是八進位制,故一路連線到本位輸出線第1線上,另一路連線到輸出進位線第1線上(連線)。運算過程:當輸入線組中A組第4線是高電平,B組第5線是高電平時,與門Y45開啟,與門輸出經兩個二極體分別連線到輸出本位第1線和進位第1線上,故此兩條線變成高電平,透過編碼電路數顯電路,便可顯示本位1進位1。就這麼簡單。
這裡的分形僅僅是對“進位”和“本位”的分形,其它演算法分形因圖形太大,無法公開。
知道逆向神經網路運算的組網過程後,便可以著手搭建實體電路,先從簡單入手。逐步深入搭建更大的網路。二進位制神經網路單元:一個逆向神經網路單元只有兩個空間變數0和1,兩個空間節點
,
,和
,
。用一個與門晶片,八隻二極體。四個與門Y00,Y01,Y10,Y11按陣列形式分佈,八個二極體兩個一組分別連線到與門的輸出端,作分形管使用。輸入逆向神經網路單元資訊用兩條線表示,兩組輸入共四條線,
,
,和
,
。組成逆向神經網路加法器的輸入層,把四個與門的八個輸入端進行搭配組合,分別與輸入的四條線連線,把四個與門的四個輸出端連線分形二極體,一個端子上連線兩個二極體正極,八隻二極體有八個輸出節點,用和輸入相同的方法,用四條線表示逆向神經網路輸出層,輸出依然是
,
,和
,
。不過這裡
,
,作為本位輸出層,
,
作為進位輸出層。把Y00門上接的兩個二極體按運算結果(0+0=0)分別連線到輸出層的本位線
,進位線b0上。把Y01門上接的兩個二極體按運算結果(0+1=1)分別連線到輸出層的本位線
,進位線
上。把Y10門上接的兩個二極體按運算結果(1+0=1)分別連線到輸出層的本位線
,進位線
上。把Y11門上接的兩個二極體按運算結果(1+1=0進位1)分別連線到輸出層的本位線
,進位線
上。
這樣輸出層輸出的逆向神經網路資訊,便就是二值加法輸出,喜歡的朋友可以連線一些編碼顯示部件,展示運算結果。

從上圖可以看到,用逆向神經網路組成的加法器,就把單隻二極體算作一個元件(實際積體電路是把兩隻看做一隻)只有12只元件,明顯的比用二值邏輯建成的28管加法器少16只元件,這也是逆向神經網路所具備的優勢。
下面公開一些不同進位制的逆向神經網路加法器的模擬圖,大家可以自己體會。喜歡動手的朋友可以製成各種不同進位制的加法器,乘法器、減法器、除法器以及一些工程控制使用的控制器等許多邏輯控制器件。不喜歡動手的朋友,只要會使用電路模擬軟體按照下面圖形連線,確定引數,可以係數模擬任意進位制的運算。

需要說明一下,關於顯示,從人們的生活習慣來說,數學的計算用數字顯示最為直觀,但是,指示燈顯示對逆向神經網路單元來說更為直觀,不過沒人注意評判這種顯示的含義,朋友們不方把一組顯示燈當做一個不可分割完整的資料來看待,有滅有亮,互相對比。當你能想到開頭所說的內容的話,你應該就明白逆向神經網路單元資訊是怎麼樣的一種資訊。其實我們早已司空見慣了。
三進位制逆向神經網路加法器,9個與門和18只二極體組成,搭接網路的方法依然是用三進位制神經網路資訊作為輸入層,9個與門按量化邏輯的全與邏輯關係連線起來作為邏輯運算層,9個邏輯閘Y0,Y1,Y2……。Y9產生9個標記輸出,用兩個一組(只有進位和本位)把兩二極體正極和標記節點連線,各標記輸出點上連線一樣,這樣產生18個輸出。輸出層因是三進位制,故設立三條線為本位位權線
,
,
,設立兩條線為進位位權線
,
。輸入兩路逆向神經網路單元資訊
,
,
,和
,
。用量化邏輯中搭配組合的方法先搭成邏輯運算部分,然後(賦意)兩位三進位制進行加法運算,再(分形)加法運算會產生兩種不同資訊,進位資訊,本位資訊,之後再(承意連線)如:1+2=3,3已經滿值,換成進位和本位兩種表答方式,進位為1,本位為0。把一隻分形二極體連線到進位1線上,另一隻二極體連線到本位0線上……。。如此反覆依次操作9次,三進位制加法運算全部完成,運算網路也搭建起來。
5.
多進位制逆向神經網路計算機加法器電路展示:



6.
多進位制逆向神經網路計算機整體架構
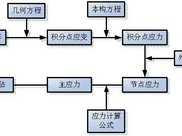
由於邏輯思想的不同,對計算機的架構設想有較大差別,二值邏輯思想下計算機內部所有部件都執行在二值狀態,所有的不適應裝置資訊,必須用轉換器件轉為二值狀態,輸出也是一樣,這樣真實的二值計算機實際上是一個封閉執行的自閉系統,無法與自然資訊有效銜接,這就使得實現智慧化時遇到困難,大量的外部裝置能否與計算機配合,將是衡量計算機人工智慧關鍵。
逆向神經網路計算機是按量化邏輯思想設計的機器,除機器內部系統執行的資訊是多進位制資訊之外,還延長了計算機汲取資訊的能力,自然資訊本身就是多值化的(不是人為多值化),如果能讓計算機執行資訊和自然資訊協調一致,那麼,計算機人工智慧就會向前邁進一大步。這也是我們所期待的。下圖是逆向神經網路計算機的一種結構設想,有興趣的朋友可以仔細閱讀。有一種捷徑,利用譯碼器的輸出作為逆向神經網路計算機的輸入輸出資訊,在目前來看可以相容當前大量使用的軟體系統,但其本質依然和二進位制計算機一樣,只不過計算機內部執行採用多值資訊罷了。

二進位制計算機和多進位制及十進位制逆向神經網路計算機資訊處理流程結構方法比較
至於其它進位制的電路圖我就不一一貼出了,留給網友自己用我提供的方法組建。
7.
多進位制逆向神經網路計算機效益
關於運算速度
逆向神經網路計算機其執行關鍵部件是簡單邏輯閘和二極體,是高度並行的網路連線佈局,資訊從輸入層到輸出層只經歷四隻管子(包括進位運算),任何一種運算只需啟動這四隻管子組成的串聯連線通路,四隻管子5個節點的電壓建立時間,就是機器運算的速度。如果要用時間來衡量,所有的運算只用一個時鐘週期(不含當次運算依賴上次運算的結果的運算要求)。因此,提高工藝水平,任然會對速度有極大的提高。
關於能量消耗
逆向神經網路計算機因其是高度並行的網路架構,其一位運算網路執行的邏輯部件只有兩隻場效應三極體和四隻二極體,能量消耗主要是傳輸過程的能量損失,工作的管子不需要電源,只從輸入資訊中汲取電力,所以,大量的元件都處於無電的靜默狀態,這樣節約的電力是無可比擬的。進位制越高越省電,是逆向神經網路計算機的巨大特徵。這裡原因很簡單,因為逆向神經網路計算機,無論是二進位制還是三進位制還是四進位制…。。十進位制一百進位制…。。運算器執行的是依照逆向神經網路資訊單元的資訊運轉,一個逆向神經網路單元中只有一個節點是有效資訊,所以在眾多的網路連線中,啟用的只有一路網路資訊通道,也只有此一路資訊通道上的元件才消耗能量,並且只是傳輸型消耗,損失甚微,用逆向神經網路單元的資訊輸入能量,完全可以滿足通道上的傳輸損耗。這樣,無論是十進位制,還是百進位制,還是千進位制,儘管組成網路的元件數量龐大,但只有一路四隻管子才消耗能量。其它元件靜默,靜默意味著不加電,這就是進位制越高越省電的原因。這種情況,網友們可從前面圖中十進位制逆向神經網路加法器中我所標註的運算線中看到,網友們也可以換一種輸入數字,你看可以打通那些通道,關閉那些通道,關閉了多少通道。關閉通道處於一種什麼狀態。
關於運算能力
逆向神經網路十進位制資訊不能用二進位制資訊單位“位元”來表示,因為兩種資訊表達架構不同,進位制不同,關鍵是這兩種資訊來源於不同的“邏輯關係”,故此有著巨大的差別。按量化邏輯的基本思想,十進位制及多進位制神經網路資訊是空間分佈的多個節點資訊組成一個整體資訊,且這種結構是不能分割的,每一個逆向神經網路資訊是一組多個節點的單元資訊,不是孤立的單節點資訊。因此用“簇”這種象徵著空間“一捆”“多條”匯聚到一起的詞,來表達逆向神經網路單元資訊的資訊量最為貼切。這樣,一簇二進位制資訊有兩個空間變數
T=a0,a1。一簇三進位制資訊有三個空間變數T=a0,a1,a2。一簇四……。。。再由於逆向神經網路單元資訊的結構(因是空間資訊,於是有結構)多數節點處於靜默狀態,唯一有一個節點資訊處於“凸出”或“凹陷”的表達方法,於是任意進位制的逆向神經網路資訊實質有效的資訊只有一個,表現在一個節點上,在不同的時間間隔裡,在各個節點上輪流的出現“有效”狀態,這和當今二值邏輯資訊差別甚遠。
逆向神經網路計算機資訊量值“簇”和二進位制計算機資訊量值“
bit
”之間的關係。由於“簇”和進位制相關,所以,不同的進位制所表示的“簇”資訊和bit的關係是不同的。
二進
位
制的 一“簇”=log2(2)=1(bit)
三進位制的 一“簇”=log2(3)=1。58(bit)
四進位制的 一“簇”=log2(4)=2(bit)
…… ……。。
十進
位
制的 一“簇”=log2(10)=3。32(bit)
100
進位制的 一“簇”=log2(100)=6。65(bit)
1000
進位制的 一“簇”=log2(1000)=9。96(bit)
一簇十進位制資訊相當於
log2(10)=lg(10)/lg(2)=1/lg(2)=3。321928
bit
二進位制資訊,因此一位十進位制數相當於3。321928位二進位制數,一臺10位十進位制逆向神經網路計算機相當於一臺33。21928位的二進位制計算機
。
一臺 3進位制的逆向神經網路 一位計算機相當於一臺1。59位的二進位制計算機
一臺 4進位制的逆向神經網路 一位計算機相當於一臺2 位的二進位制計算機
…… ……
一臺 10進位制的逆向神經網路 一位計算機相當於一臺3。32位的二進位制計算機
一臺 100進位制的逆向神經網路 一位計算機相當於一臺6。65位的二進位制計算機
一臺1000進位制的逆向神經網路 一位計算機相當於一臺9。96位的二進位制計算機
此即為多進位制計算機的運算能力。
寫在最後的話:
逆向神經網路計算機是把人類運算能力附著在空間網路上進行運算的計算方法,在硬體使用上並無特殊結構,依然使用具備自然屬性的二值邏輯電路,不過從理論結構上而言,空間網路的建立依然要突破二值邏輯思想的諸多限制,改變人類對自然事物的認知,才能實現有意義的邏輯理論。
本解密檔案,深刻的揭示了胡五生關於多進位制及十進位制逆向神經網路計算機的神秘面紗,其實都是一些極為簡單的邏輯組合。因胡五生專利涉及範圍較廣,大多數為計算機領域,圍繞著計算機的組成而申請的專利技術保護,如:運算器類,控制器類,暫存器類,匯流排收發控制類,移位、地址控制類,目的是想要建立起比較完整的實現新型計算機硬體。歡迎廣大朋友研發升級,我希望廣大網友能在我研發的基礎上,有更高的突破,
但應當注意研發的引用,但凡涉及到我專利的技術,不能侵權,更不能據為己有並大肆宣傳,干擾市場運作。
如有侵權,必定嚴懲
。
想進一步瞭解的朋友,可訪問“天水藍靈”的微博,檢視相關專利
甘肅省天水市 胡五生